In the Soft Robotics Lab, we create soft robots and interfaces as well as advanced sensors for soft robots. These systems are made of materials and components that are flexible and soft (low shore hardness factor).
Soft, stiffness-controllable manipulators
In EU FP7 project STIFF-FLOP, we have developed a soft manipulator with embedded sensors in collaboration with Scuola Superiore Sant’Anna.
The STIFF-FLOP surgical robot is inspired by the octopus. In particular, we are exploring how to achieve a transition between a soft and stiff state. Allen Jiang, a former PhD student at King’s CoRe, investigated the influence of different types of membranes and granulars on the stiffening mechanism. This idea has been integrated into the STIFF-FLOP manipulator.
In fact, the octopus arms have two sets of muscles which “collaborate” in an opposing way to actuate a link or a link segment, such as an arm. It has longitudinal and transversal muscles in its arms and activating both sets of muscles, the octopus arms can be stiffened.
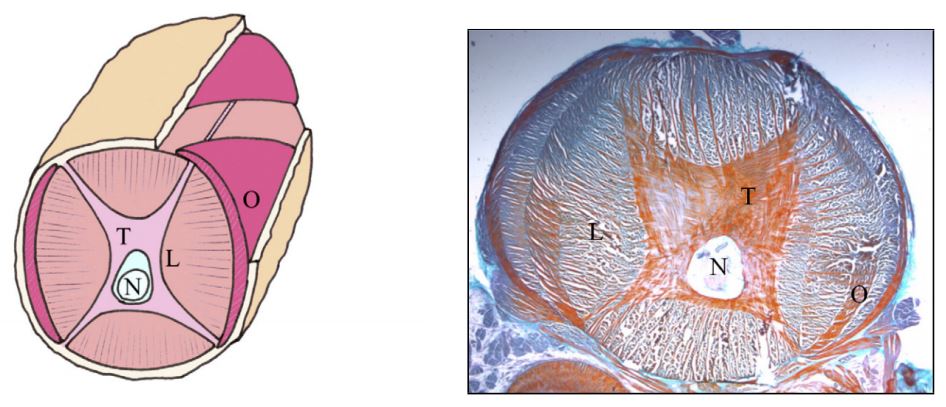
In octopus arms, biologists speak about the connecting tissue that keeps the muscles of the octopus arms in place, avoiding bulging and allowing the animal to achieve stiffness in their arms (comparable to a tube inside a bicycle tire). A similar behavior is achieved with the hybrid manipulation principle developed at King’s CoRe.We created a soft, inflatable manipulator that is antagonistically actuated by tendons and pneumatics. The combination of the two actuation mechanisms in this antagonistic robot structure is inspired by the octopus which uses its longitudinal and transversal muscles to steer, elongate, shrink and also stiffen its continuum arms. By ”activating”
its antagonistic muscle groups at the same time, the octopus can achieve multiple motion patterns as well as stiffen their arms.
More details can be found in our IROS and ICRA (nominated for Best Student Paper Award) papers and in the March 2015 RoboSoft Newsletter.
Haptic interfaces
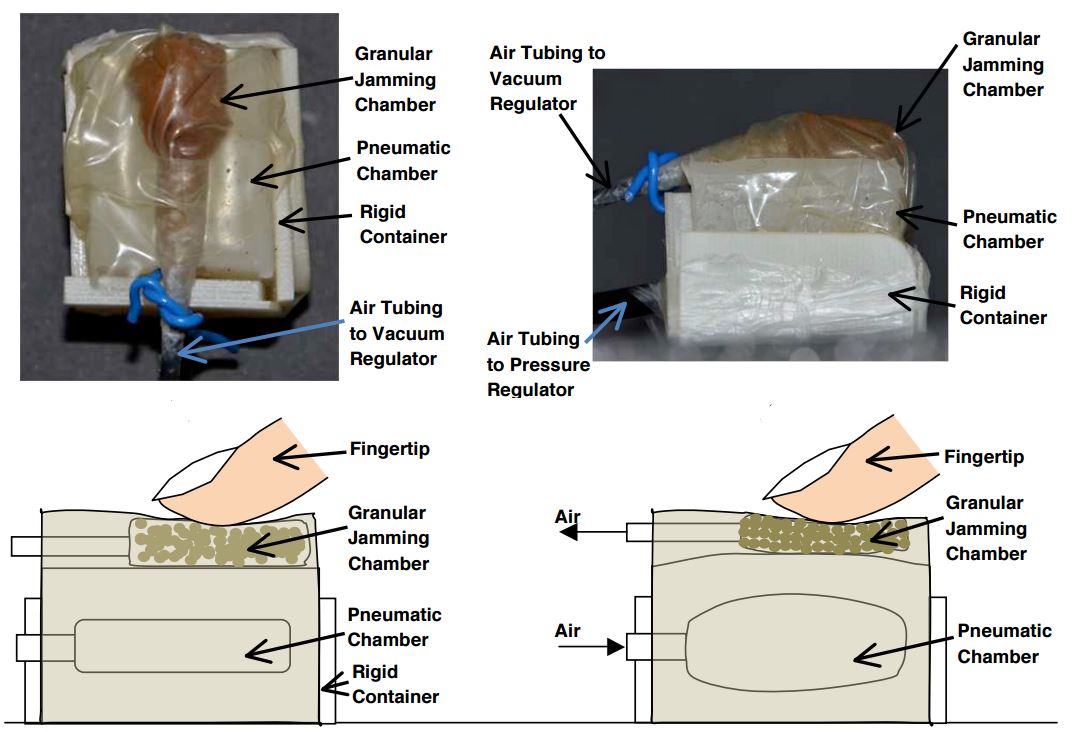
We have created a multi-fingered haptic palpation method using stiffness feedback actuators for simulating tissue palpation procedures in traditional and robot-assisted minimally invasive surgery. Soft tissue stiffness is simulated by changing the stiffness property of the actuator during palpation. For the first time, granular jamming and pneumatic air actuation are combined together to realize stiffness modulation.
The advantage of multi-fingered palpation using the proposed actuators is proven by the comparison of the results of the stiffness discrimination performance using two-fingered (sensitivity: 82.2%, specificity: 88.9%, positive predicative value: 80.0%, accuracy: 85.4%, time: 4.84 s) and single-fingered (sensitivity: 76.4%, specificity: 85.7%, positive predicative value: 75.3%, accuracy: 81.8%, time: 7.48 s) stiffness feedback.
More details are published in the IOPscience Smart Materials and Structures journal which was selected for “Highlights of 2014”.
Sensing for soft robots
We have created tactile sensors taking inspiration from cucumber tendrils that have shown to be ideal tactile sensors for the plant that they are associated with providing useful environmental information during the plant’s growth.

Incorporating the sensing principles of cucumber tendrils, King’s CoRe has created miniature sensing elements that can be distributed across the surface of soft manipulators to form a sensor network capable of acquire tactile information. Each sensing element is a retractable hemispherical tactile measuring applied pressure. The actual sensing principle chosen for each tactile makes use of optic fibres that transfer light signals modulated by the applied pressure from the sensing element to the proximal end of the robot arm. Due to the simple structure of the proposed tactile sensor element, it is miniaturisable and suitable for MIS.

An important contribution of this work is that the developed sensor system can be ”loosely” integrated with a soft arm effectively operating independently of the arm and without affecting the arm’s motion during bending or elongation.
Within STIFF-FLOP, we have looked into integrating a 3 DoF force/torque sensor into the STIFF-FLOP manipulator. The video below shows the use of this sensor for reflex control.
Contact
Dr Helge A Wurdemann, Leader of the Soft Robotics Lab
Prof. Kaspar Althoefer
Dr Hongbin Liu
Dr Thrish Nanayakkara
Agostino Stilli