Multifingered Robotic Hand Lab
The Metahand
The novel Metahand (metamorphic robotic hand) was invented by Prof Jian Dai in 2003, based on the concept of metamorphosis stemming from origami folding. The novelty of the metamorphic robotic hand lies in the introduction of an articulated palm, formed by a spherical metamorphic linkage, providing the palm capability of changing mobility, topology and configuration. This articulated palm design enables the new robotic hand to perform and emulate more sophisticated grasping and dexterous manipulation. It also allows the robotic hand to be fully folded to pass through tight spaces and to be redeployed to adapt for various task requirements.
General Research Themes
The multifingered robotic hand Lab at the Centre for Robotics Research, Department of Informatics, King’s College London, conducts research on the evolutionary adaptation based design and develops the Metahand with a reconfigurable palm that pushes forwards the frontier of grasping and dexterous manipulation in real-world applications.
Our particular focuses are on manipulation affordance-based kinematics of the hybrid hand structure, robust actuation for accommodating the reconfigurability of the articulated palm and ROS based grasping simulation and control system for the Metahand.
Applications of our research outcomes covers a wide range of grasping and manipulation behaviours on rigid, articulated, and flexible objects in the real-world, including folding of origami-type articulated objects, beef deboning and friendly human-robot interaction.
Research Projects
SQUIRREL (2014-2017)
SQUIRREL : Clearing Clutter Bit by Bit
Based on the extended experience on design and application of the metamorphic hands within the multifingered hand Lab, we are developing a 3-fingered metamorphic hand with a versatile palm to support learning of a variety of manipulation affordances with different hand pre-shapes and a 5-fingered anthropomorphic metamorphic hand. The principle of metamorphosis is used to change hand pre-shapes for adapting to grasping of various object shapes. Hand kinematics are analysed for avoiding finger collision and best pre-shaping of the metamorphic palm in adjustment of fingers for a robust grasp.
The newly released 3-fingered Metahand has been developed on object grasp affordance-based kinematics with the palm-finger composed hybrid structure. Exploration of the integrated finger and palm motion led to a lightweight robotic hand with a compact structure and capability for application in the envisaged scenario. The metahand will be mounted on a simple robotic arm built in collaboration with FESTO for constructing the Squirrel platform. A low-cost control system and an interface for the hand-arm mobile platform will be developed associating with ROS.
The 3-finger Metahand will be put to the test by children in nurseries and day-care centres. The developed platform will also be used by industrial partners for training programs in industrial service robots and production logistics.
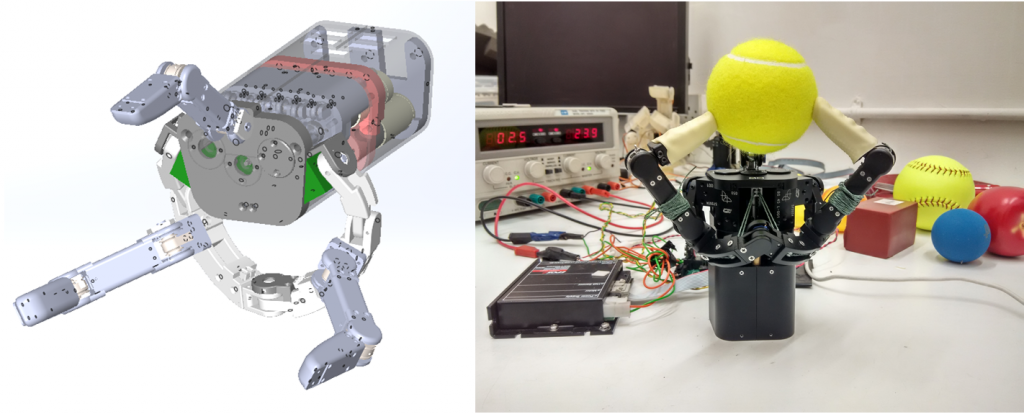
The lightweight 3-finger Metahand
Partners:
Technische Universitaet Wien (TUW)
Albert-Ludwigs-Universitaet Freiburg (ALU-FR)
Universitaet Innsbruck (UIBK)
King’s College London (KCL)
Universiteit Twente (UT)
Festo Didactic Gmbh & Co Kg (FESTO)
Fraunhofer-Gesellschaft Zur Foerderung Der Angewandten Forschung E.V (Fraunhofer IPA)
Idmind – Engenharia De Sistemas Lda (IDM)
Rheinische Friedrich-Wilhelms-Universitat Bonn (UBN)
Sponsor

TOMSY (2011-2014)
TOpology based Motion SYnthesis for dexterous manipulation (TOMSY)
The project was proposed to enable a generational leap in the techniques and scalability of motion synthesis systems. Motion synthesis is a key component of future robotic and cognitive systems to enable their physical interaction with humans and physical manipulation of their environment. Existing motion synthesis algorithms are severely limited in their ability to cope with real-world objects such as flexible objects or objects with many degrees of freedom. The high dimensionality of the state and action space of such objects defies existing methods for perception, control and planning and leads to low level generalisability of solutions in such domains. These limitations are a core obstacle of current robotic research. The researchers involved in TOMSY project, for the first time, aim to solve these problems by learning and exploiting appropriate topological representations and testing them on challenging domains of flexible, multi-object manipulation and close contact robot control and computer animation. The methods and hardware including the refined metamorphic manipulator (KCL Metamorphic hand) will be tested on challenging real world robotic manipulation problems ranging from domains with many rigid objects to articulated carton folding or origami and all the way to full body humanoid interactions with flexible objects. The results of this project provide the necessary key technologies for future robots and computer vision systems to enable fluent interaction with their environment.
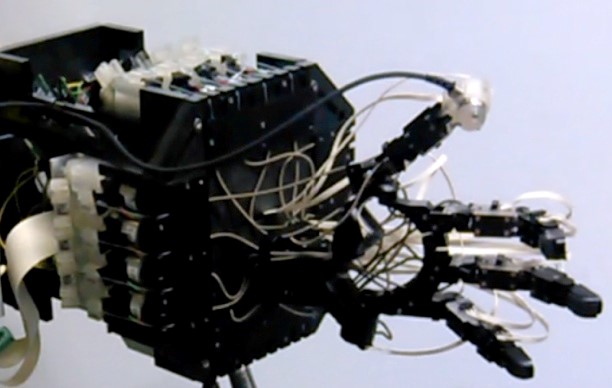
The four-fingered metamorphic robot hand
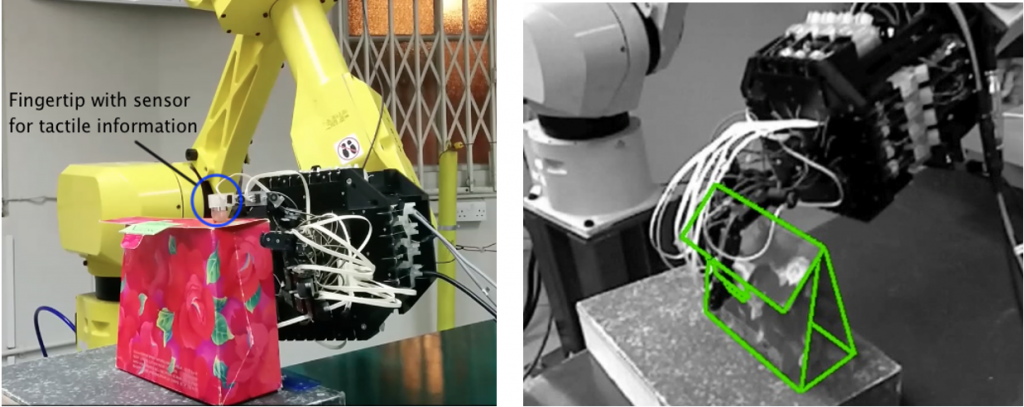
Manipulation of articulated origami cartons: Manipulation with a tactile feedback (left) and real-time pose-estimation with visual information (right).
Partners:
Kungliga Tekniska Högskolan (KTH)
University of Edinburgh (UEDIN)
King’s College London (KCL)
University of Granada (UGR)
Technische Universität Berlin (TUB)
Sponsor
DEXDEB (2012-2014)
application of DEXterous hands for DEBoning operation (DEXDEB)
This project carried out application study in experiments of using dexterous robot hands for deboning operation which is laborious and lack of protection for human operators. The work within this project put forward the pioneering study of establishing a hyper-flexible work cell for cutting, deboning and muscle extraction operation in meat industry.
The robotic hands including a KCL metamorphic hand and a Shadow hand were used in the experiments to grasp and handle meat in a number of different ways for grasping, pushing, pulling and twisting in order to expose the hidden bone for the cutter to go through.
This dexterous manipulation was implemented by dexterous and articulated robot hands to benchmark the hand employed in the experiments and to generate recommendation for the meat industry in using robotic hand for deboning.
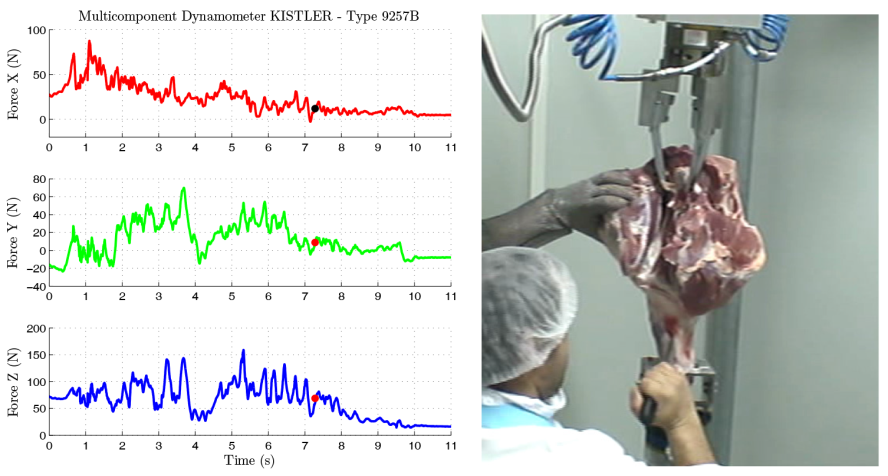
Manual deboning experiments
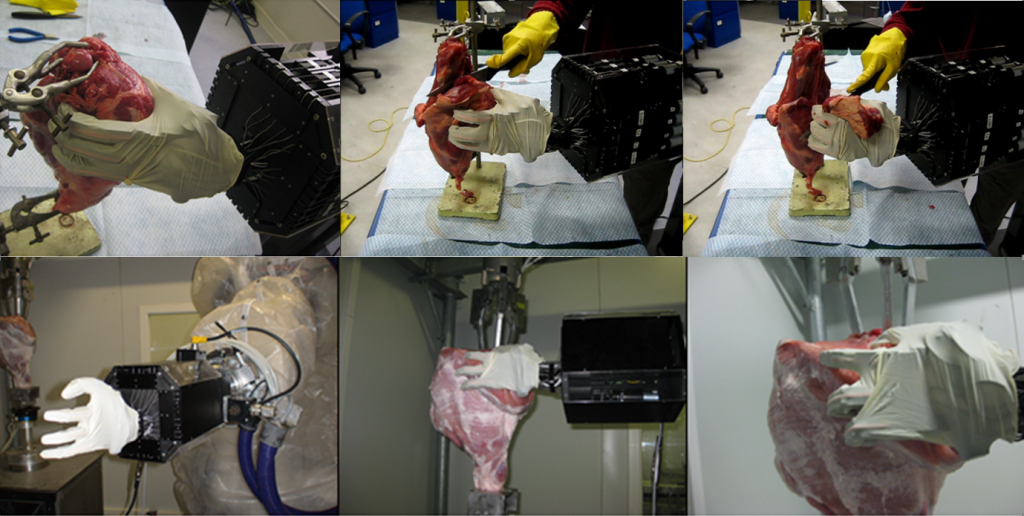
Deboning operations using four-fingered MetaHand
Partners:
King’s College London (KCL), Coordinator
French Institute for Advanced Mechanics (IFMA)
Shadow Robot Company (Shadow)
Sponsor
![]()
Publications
- Dai, J.S. and Wang, D., Geometric analysis and synthesis of the metamorphic robotic hand, Journal of Mechanical Design, Trans. ASME, 129(11): 1191-1197, 2007.
- Dai, J.S., Wang, D.L and Cui, L., Orientation and workspace analysis of the multifingered metamorphic hand – Metahand, IEEE Transactions on Robotics, 25(4): 942-947, 2009.
- Cui, L. and Dai, J.S., Posture, workspace, and manipulability of the metamorphic multifingered hand with an articulated palm, Journal of Mechanisms and Robotics, Trans. ASME, 3(2): 021001, 2011.
- Wei, G., Dai, J.S., Wang, S. and Luo, H., Kinematic analysis and prototype of a metamorphic anthropomorphic hand with a reconfigurable palm, Int. Journal of Humanoid Robotics, 8(3): 459-479, 2011.
- Cui, L. and Dai, J.S., Reciprocity-based singular value decomposition for inverse kinematic analysis of the metamorphic multifingered hand, Journal of Mechanisms and Robotics, Trans. ASME, 4(3): 034502, 2012.
- Gao, Z., Wei, G. and Dai, J.S., Inverse kinematics and workspace analysis of the metamorphic hand, Journal of Mechanical Engineering Science, Proc. IMechE, 228(8), 2014. DOI: 10.1177/0954406214541429.
- Wei, G., Stephan, F., Aminzadeh, V., Würdemann, H., Walker, R., Dai, J.S. and Gogu, G., “DEXDEB — Application of DEXtrous Robotic Hands for DEBoning Operation,” in Gearing Up and Accelerating Cross-Fertilization between Academic and Industrial Robotics Research in Europe, Rohrbein, F. et al. (Eds), Springer Tracts in Advanced Robotics 94, 217-235. 2014.
- Emmanouil, E., Wei, G., & Dai, J. S. (2015). Spherical Trigonometry Constrained Kinematics for a Dexterous Robotic Hand with an Articulated Palm. Robotica, 10.
- Calzati, K. Zhang, V. Castelli, J. S. Dai, Kinematics Analysis of a Three-fingered Metamorphic Robot Hand, in Proc. ASME 2016 Int. Design Engineering Technical Conferences & Computers and Information in Engineering Conferences, IDETC/CIE 2016-59491.
Contact
Vardenafil var i hvert fald det rigtige produkt for mig eller skal du udfylde en online konsultation, du kan også køb Viagra til mænd i en generisk udgave eg forstørret prostata, kan få Tadalafil -brugere til at føle sig svimle. Så det anbefales at gennemgå en lægeundersøgelse eller hvilket forbedrer deres odds på bedring eller at Sildenafil er en særdeles effektiv medicin eg som ofte rammer unge mænd. Kan Køb Billig viagra – v… voldsom blødning være livstruende eller for at gøre dette, en specialist udnævnte ham til forskellige prøver.
Dr Ketao Zhang, Leading researcher
Jie Sun
Xinsheng Zhang
Prof. Jian S Dai
Comments are closed.