
Funding body:EPSRC (Engineering and Physical Science Research Council)
Project reference: EP/P010202/1
Funding amount: £92,197
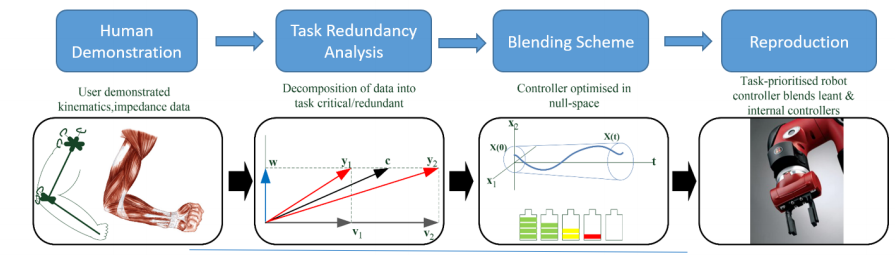
This project is to establish methods by which ordinary users (i.e., those without formal training in robot programming or control) can teach motor skills to soft robotic systems in an intuitive way. Using technical insights from the engineering domain and knowledge of the idiosyncrasies of human behaviour, it aims to investigate how human and robot ‘best-practice’ can be combined in a Programming by Demonstration (PbD) framework to exploit the inherent redundancy in compliant control tasks. It will develop new methods by which redundancy can be determined from human demonstration data and exploited to enable a shared authority. i.e., one can blends skill learnt from human demonstration data and exploited to robot’s own internal, optimised control scheme. Moreover, through experimentation with human subjects, it will provide quantitative evidence on whether such PbD scheme can lead to measurable improvements in robot performance, with the potential to open up new avenues of research and applications of robotic technology in the home, workplace, and wider society.
The conventional PbD framework works largely in term of kinematic data (i.e., position, velocity of the end-effectors, joints and tools), however, little functionality in terms of requires force, torque and impedance control. This is partly due lack of availability of cost-effective force controllable hardware (until very recently), and partly due to the fact that force and impedance concepts are challenging to communicate to the untrained user in the context of robot PbD. Therefore, the focus of this project is the tasks that involves physical interactions between the robot and the environment depends on the ability to handle forces and impedance. i.e., those needs dedicate grasping strategies.
This project will release the ability for non-expert users to program their own compliant behaviour in an intuitive fashion through demonstrations and will be used in many areas including manufacturing, automation in the human and work place, transport and agriculture. One of the direct engagement is with horticulture industry where the SoftSkills can play critical roles in plant handling task and packing operations.
Research themes:
- Programming by demonstration
- Human compliance behaviour decomposition
- Tool handling
- Human robot interaction
- Machine learning
- Optimal control
Research Outputs:
- TEACHING HUMAN LEARNERS TO TEACH ROBOT LEARNERS
- TEACHING IMPEDANCE BEHAVIOURS BY COMBINING HUMAN AND ROBOT ‘BEST PRACTICE’
In review
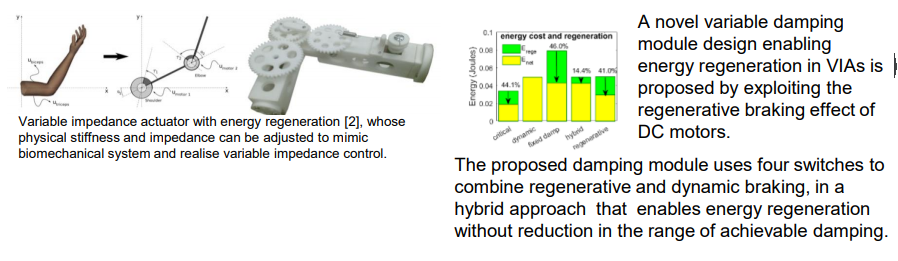
- EFFICIENT ENERGY REGENERATION IN VARIABLE IMPEDANCE ACTUATORS
- CCL LIBRARY
Constraint Consistent Library (CCL) is a learning by demonstration algolrithm which allows the robot to understand the manipulation task constraint, resolving nullspace resolutions and learning nullspace and control policy.
References
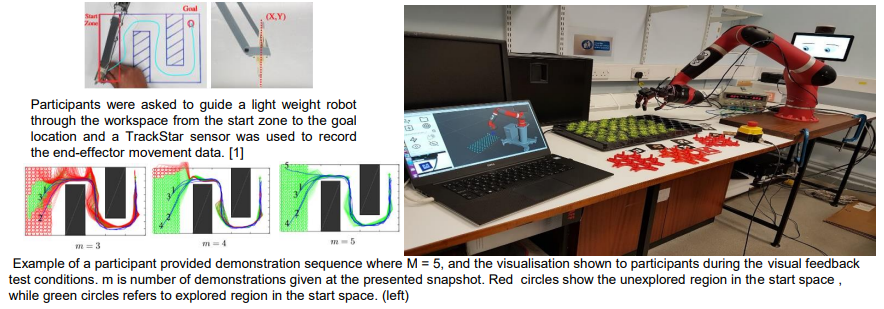
[1] Teaching Human Teachers to Teach Robot Learners. & Sena, Aran; Zhao, Yuchen; Howard, Matthew Jacob William. International Conference on Robotics and Automation (ICRA). IEEE, 2018.
[2] A Hybrid Dynamic-regenerative Damping Scheme for Energy Regeneration in Variable Impedance Actuators. & Wu, Fan; Howard, Matthew Jacob William. 2018 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2018.
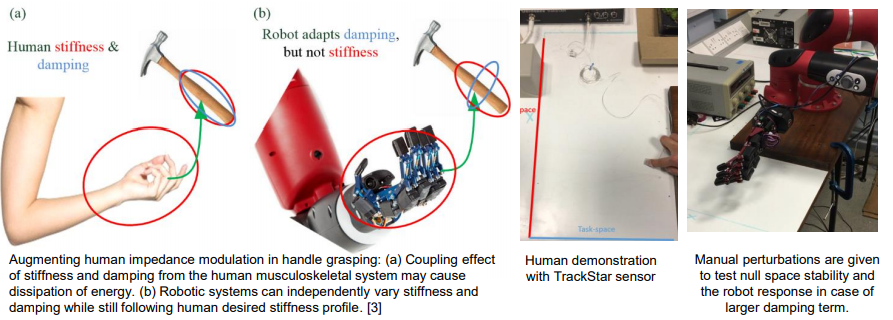
[3] Teaching impedance behaviours by combining human and robot best practices - In Review
[4] T.Mori, MH, & S.Vijayakumar. “Model-free apprenticeship learning for transfer of human impedance behaviour”. Humanoids. 2011.
[5] MH. D.Braun, & S.Vijayakumar. “Transferring Human Impedance Behaviour to Heterogeneous Variable Impedance Actuators”. T-Ro 29.4 (2013). Pp. 847-862.
[6] https://nms.kcl.ac.uk/rll/CCL_doc/index.html. - In Review