
Funding body: Agriculture and Horticulture Development Board - AHDB
Project reference: HNS/PO 194
Funding amount: £68,577
Project duration: 3 years
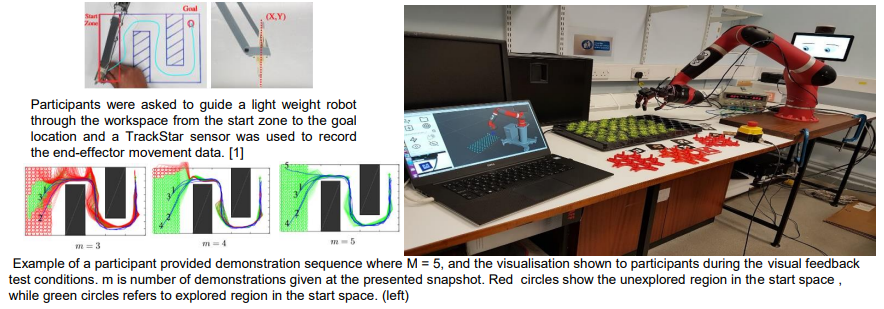
This project will explore the use of new, human-robot interactive, soft robotic systems and their application for semi-automated propagation of multiple varieties of ornamental plants. It will investigate ways in which non-expert users (i.e., those without technical expertise in robot programming and control), but that are nevertheless skilled in plant processing, can use robots in their work, to relieve them of the more repetitive, labour-intensive tasks encountered.
Automation in Horticulture presents many interesting challenges for robotics. Handling of plant material is a task that many people can perform without much concentrated effort (picking a flower, organising flowers in a vase, etc.); however the light, flexible, and fragile nature of plants and flowers makes them extremely challenging to grasp with a robotic manipulator.
Automation in horticulture is possible; however currently the systems used are large and expensive, and most critically are typically limited to working with a single or limited variety of plants at any time. These types of more traditional automation systems require large quantities of single varieties of plants to be cost effective, something which does not suit a lot of horticultural production outside of the likes of tulips or roses. Given that much of the growing which takes place in the U.K. is focused on providing high-quality variety, these challenges result in growers needing large teams of people to keep up with demand.
This project is motivated by real concern in the horticulture industry over the rising skills-gap crisis due to reducing numbers of people entering the industry at all levels. By developing robots which can be used directly by growers to address the challenges they face, we can empower them to more easily leverage their horticultural knowledge and reduce the amount of repetitive labour-intensive tasks they must now do by hand.
Key research themes in this project include Programming by Demonstration, Robot Learning Systems, Human Robot Interaction, and Biosignal Measurement and Control.
Many thanks to Kernock Park Plants, J&A Growers, and Winchester Growers who are industry representatives providing advisory support for this project.
Workshops
Supporting future horticultural robotics engineers through the Growbotics Schools Workshop Series: http://www.aransena.com/blog/2017/4/11/growbotics-workshop-series
Publications
- Teaching Human Learners to teach Robot Learners
- Improving Task-Parameterised Movement Learning Generalisation with Frame-Weighted Trajectory Generation
Media Publications
References
Gallery










