Intrinsic contact sensing, objects pose estimation, tactile object recognition, hapticsurface exploration - control, GSC.
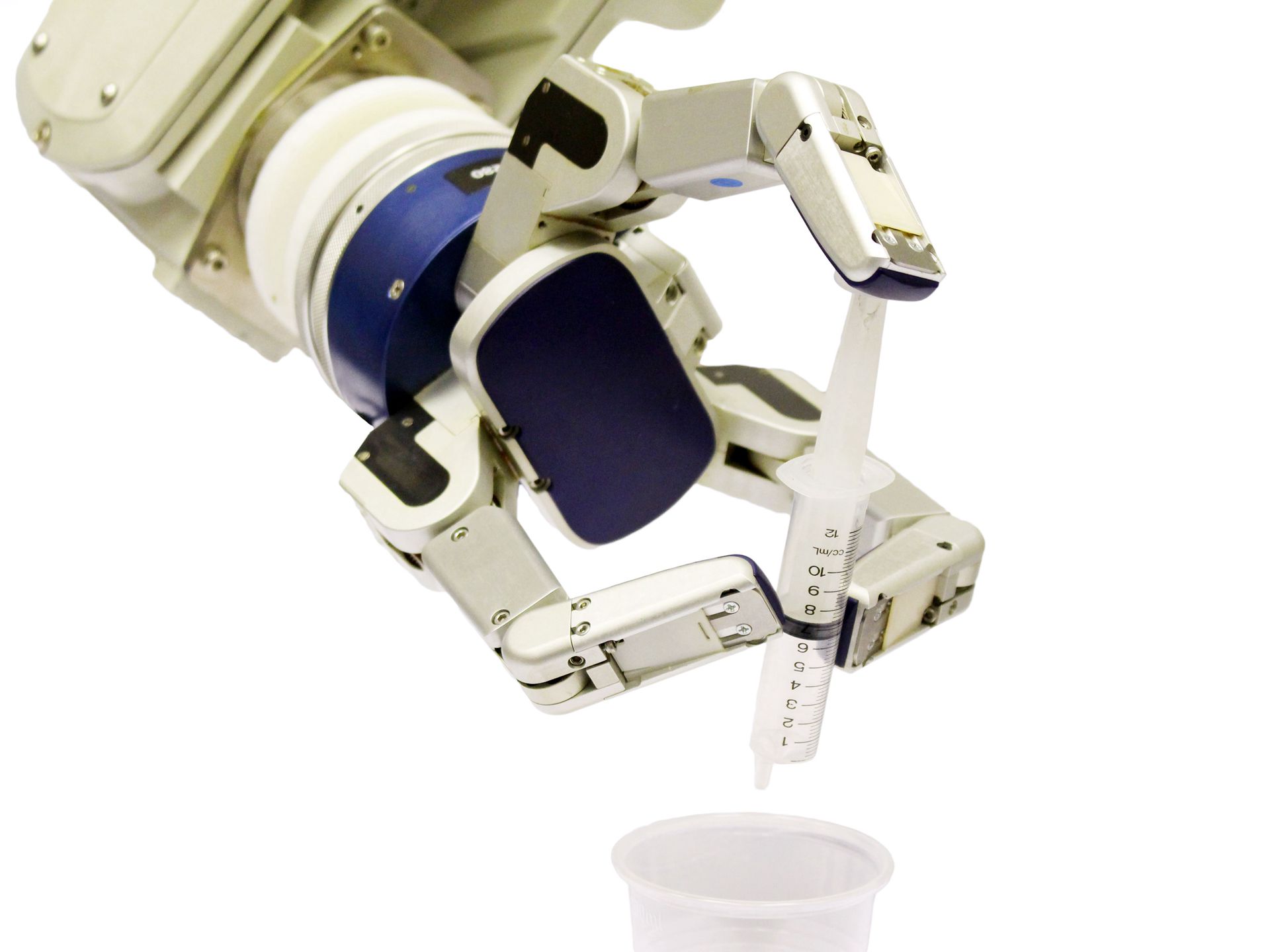
Soft tactile array-tactile gripper, remote force sensing for catheters, multi axis force sensor, intrinsic force sensing using hydraulics.
