Minimally invasive procedures using flexible continuum robots are rapidly growing as they offer a lower risk of complications compared to the highly invasive traditional surgeries. Our lab is researching on how to advance the haptic perception and interactive control to solve some major practical challenges associated with flexible continuum instruments, such as catheters. We are exploring how to effectively bring perception and action in a loop to allow interventions of using flexible continuum robots to be safer, quicker and more efficient. We are working with colleagues from Department of Imaging Sciences and Biomedical Engineering, King's College London to develop a new cardiac catheter robot for fast and accuracy steering and ablation.
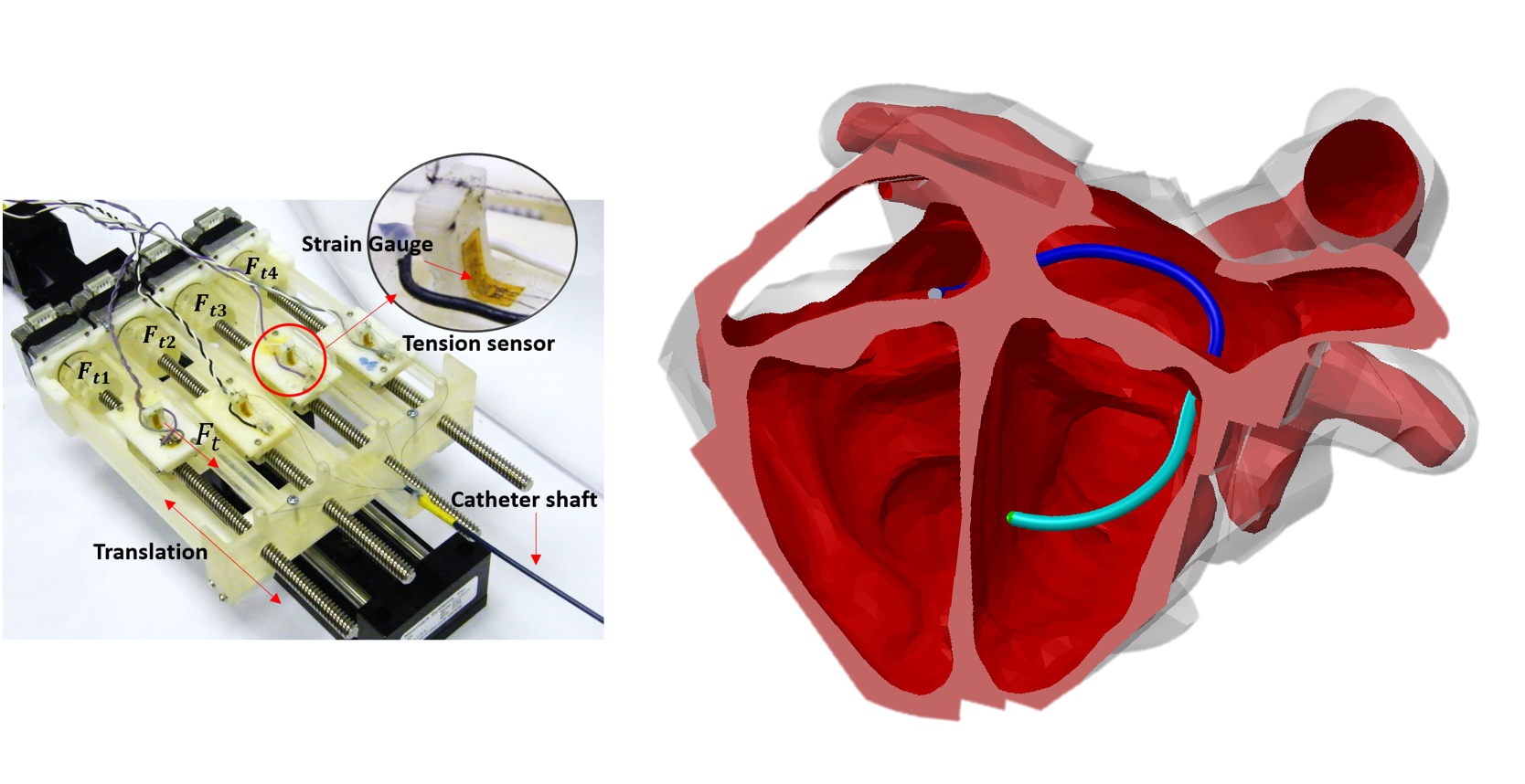
--------------------------------The KCL steerable catheter robot------------------------------------------
*Path planning for steering the catheter passing through septum hole
*Catheter steering control with unknown environment contacts
*3D remote force estimation based on bi-points tracking of catheter tip
Related publications
J Back, L Lindenroth, R Karim, K Althoefer, K Rhode, H Liu, New Kinematic Multi-Section Model for Catheter Contact Force Estimation and Steering, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp 2122-2127, Oct. 2016 (IROS2016 ABB Best Student Paper Award Finalist ) ( 10.1109/IROS.2016.7759333 )
J Back, T Manwell, R Karim, K Rhode, K Althoefer, Hongbin Liu*, Catheter Contact Force Estimation from Shape Detection using a Real-Time Cosserat Rod Model, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp 2037-2042, 2015. (Electronic ISBN: 978-1-4799-9994-1, DOI: 10.1109/IROS.2015.7353647)
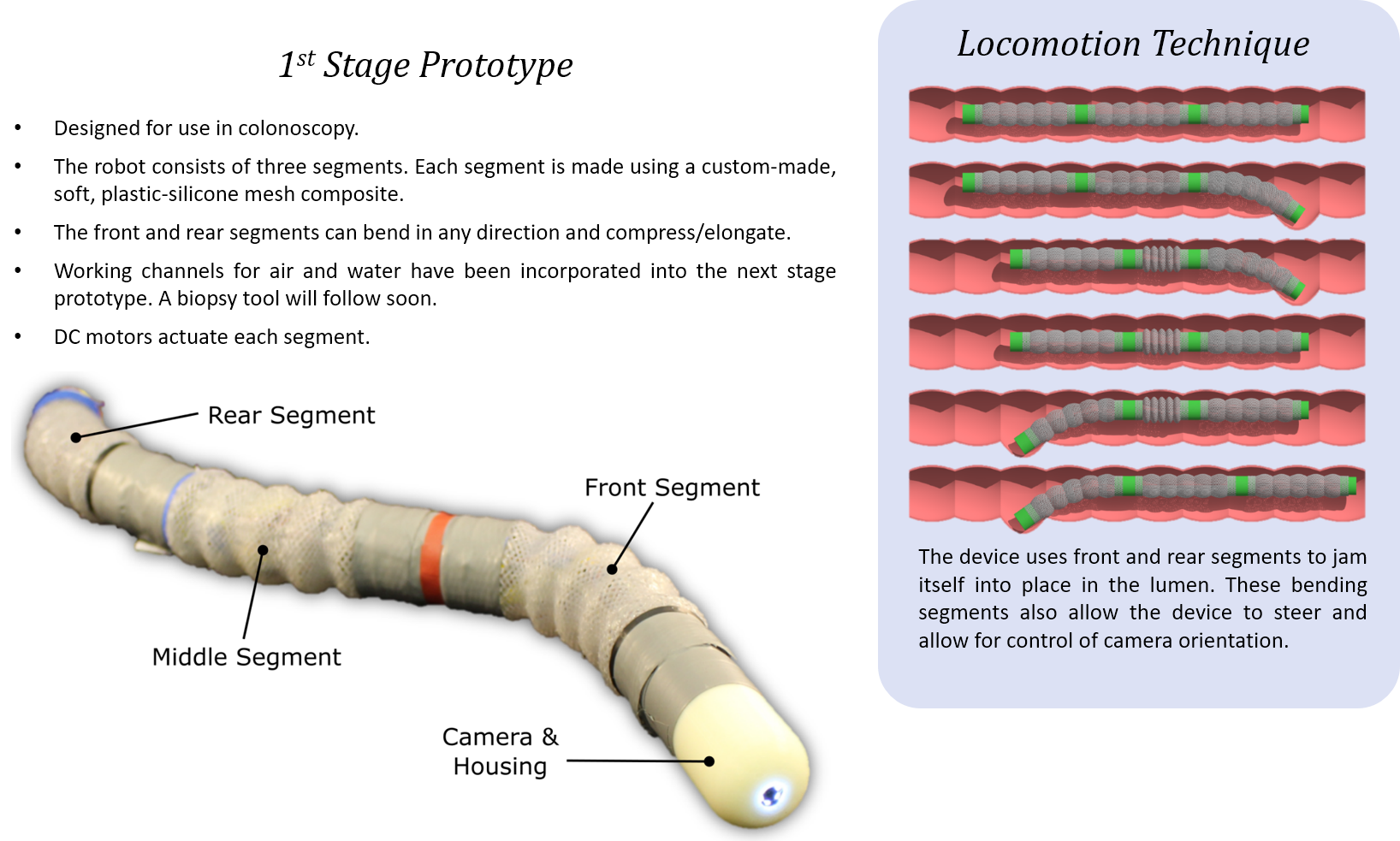
We are developing a soft and self-propelled endoscopic robot which can actively change its morphology such as shape and stiffness, allowing it to propel itself inside torturous, compliant environments, such as the human gastro-intestinal (GI) tract.The most effective method of GI diagnosis is visual inspection carried out using endoscopes. Existing endoscopes are pushed from outside the patient, creating a risk of significant pain and GI tract damage. The soft body of this robot avoids this risk of and is painless as it uses minimal, precisely controlled forces to move and naturally deforms around the GI tract. This creates an inherently safe device, placing less demand on the technical skills of the endoscopist when manoeuvring the endoscope.

------------------------------------KCL soft-self propell endoscope------------------------------------------
Julius E. Bernth, Alberto Arezzo, Hongbin Liu, A Novel Robotic Meshworm with Segment-Bending Anchoring for Colonoscopy, IEEE Robotics and Automation Letters (RA-L), In press, February 2017
Patent filed under P533299GB - “Soft Locomotive Device for Endoscopy with Adaptive Anchoring” Date: 24 February, 2017
We are also working towards an elastic mesh braided worm robot that exhibits stable steering and efficient locomotion using anisotropic friction.This robot is constructed using a ‘smart material’ integrating sensing, actuation, that is, mechanisms that perform the desired operation with passive dynamics, removing the need for complex control systems.