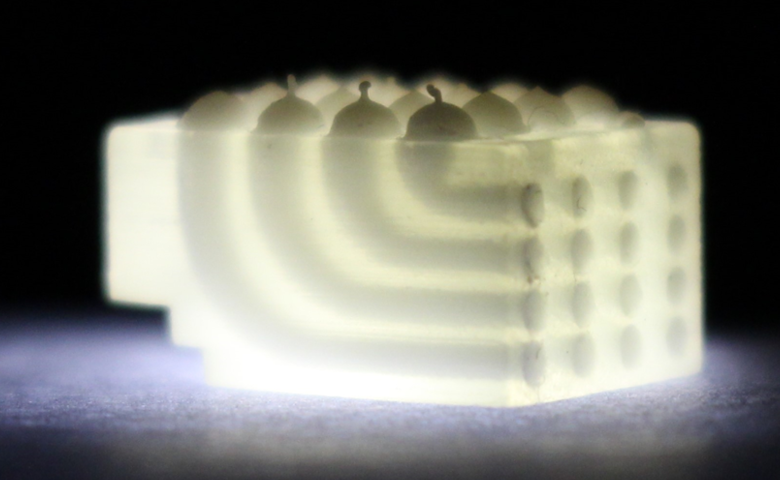
Conventional solutions for developing tactile sensors are incapable of creating distributed tactile elements for complex 3D surfaces. To solve this problem, our lab researches on a novel method in which distributed micro-channels of soft materials are created within a given structure through 3D printing. These micro soft material channels act like nerves passing through distributed tactile information into a single unit for processing.
J Back P Dasgupta, L Seneviratne, K Althoefer, H Liu, Feasibility Study- Novel Optical Soft Tactile Array Sensing for Minimally Invasive Surgery, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp 1528-1533, 2015 (Electronic ISBN: 978-1-4799-9994-1, DOI: 10.1109/IROS.2015.7353570) (PDF) |
We proposes a novel remote force sensing method for thin and flexible medical instruments based on the instrument shape tracking without the need of physical force sensors. This method, for the first time, allow accurate 3D force to be estimated by only tracking 2 points on the instrument, thus particularly suitable for imaged guided medical interventions. This work was an Award Finalist for IROS 2016 ABB Best Student Paper.
J Back, L Lindenroth, R Karim, K Althoefer, K Rhode, H Liu, New Kinematic Multi-Section Model for Catheter Contact Force Estimation and Steering, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp 2122-2127, Oct. 2016. (10.1109/IROS.2016.7759333)