Research Summary
Kinematics and mechanisms are a foundation of development of machines and robotics. King’s work on kinematics and mechanisms can be traced back to 1980s and 1990s of the work carried out by Professors Stan W.E. Earles and Prof. Lakmal Seneviratne. Since 1999, led by Professor Jian S Dai, the kinematics and mechanisms group moved to a new phase of study with a focus on theoretical and computational kinematics, screw theory and Lie algebras, theory of reconfigurable mechanisms and with a wide and cross-disciplinary application in mechatronics and robotics. The strong science initiated many original studies and development including ankle rehabilitation devices since 1999, origami folding since 1999, reconfigurable packaging since 1999, metamorphic multifingered hands since 2004, metamorphic parallel mechanisms since 2007, with a number of EPSRC, Royal Society and European Commission awards.
Research Interests
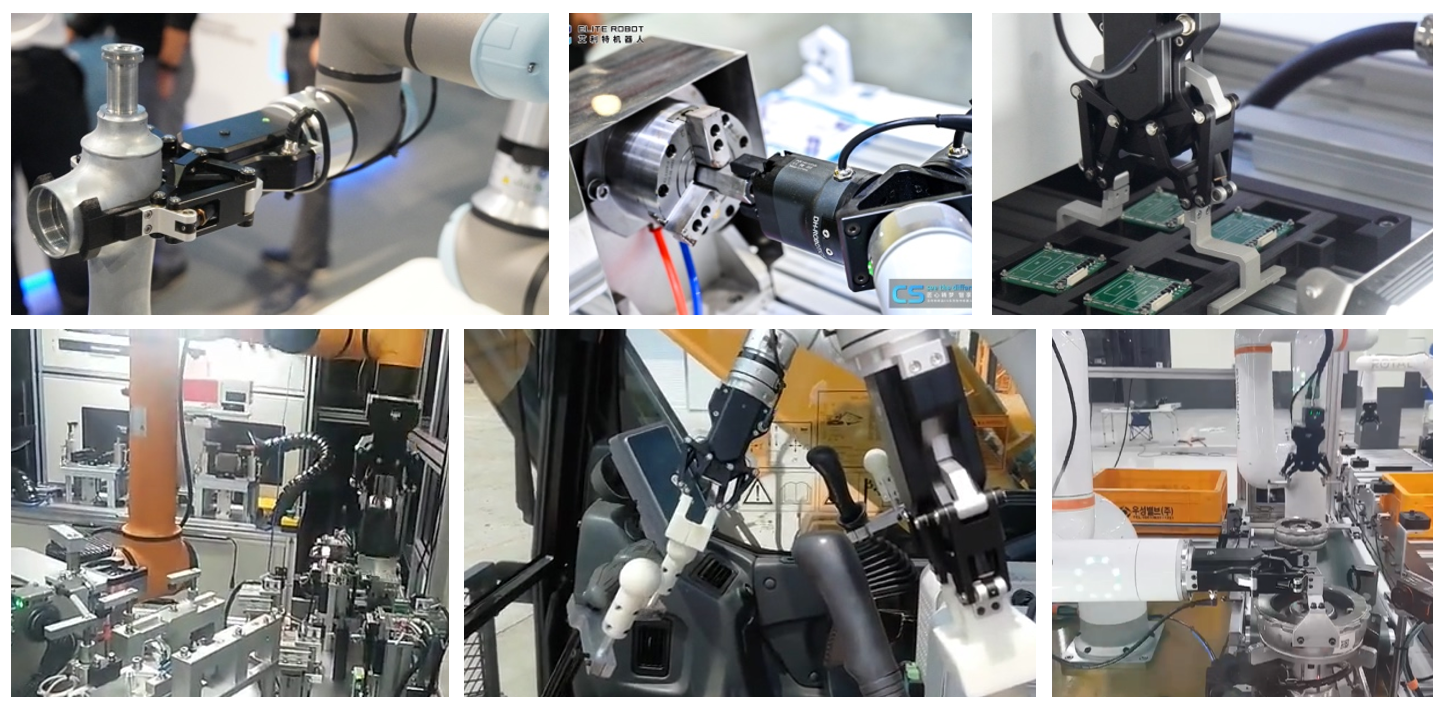
Reconfigurability in Industry
Professor Dai’s reconfigurability technology was created while he was carrying out an international project on dextrous reconfigurable assembly and packaging systems at Unilever Research in collaboration with Yamanashi University and extended to Primrose Engineering, to Novus Altair, to DH-Robotics and to Foxconn Industry Internet. A number of EPSRC projects were successfully completed and industrial collaborations were successfully carried out with Unilever Research, Primrose Engineering Co., Ltd., LEGO System A/S in Demark, Field Group, Quin Systems, DH-Robotics Co., Ltd., Movendo Technology srl and Foxconn Industrial Internet Co., Ltd.
Metamorphic Robot Hands in Use
Professor Dai’s reconfigurability technology created the metamorphic robot hands that possesses a metamorphic palm with various compatibility and dextrous adaptability. The hands were used for beef deboning, for human-robot interaction, for dextrous grasping.

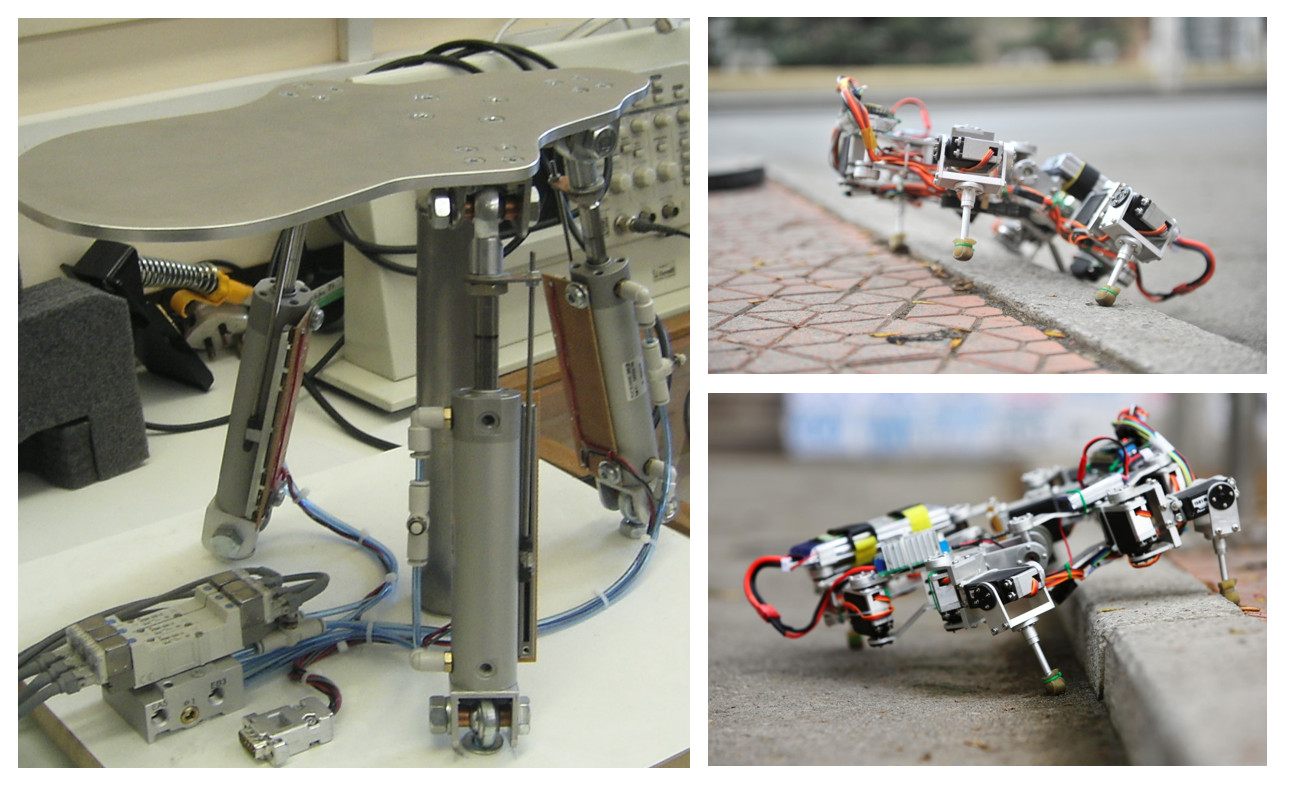
Metamorphic Robot Walkers
Professor Dai’s reconfigurability technology created the metamorphic robot walkers that possess a metamorphic reconfigurable trunk with dextrous adaptability for various terrains and environments.

The Fundamental Science and Application to Robotics
The continuing research on screw algebra and screw systems for analysis of force and motion in mechanisms and robots has resulted in key contributions in the filed of mechanisms and robotics. This includes the screw system relationship, the screw null space, new algorithms for reciprocal screws, the screw-system approach, the mechanism-equivalent approach, and the finite displacement screws. The theoretical development was then applied to parallel mechanisms and for the first time revealed screw systems and their relationship in parallel mechanisms, leading to screw-system based approach for mobility analysis in spatial mechanisms and robot manipulators. The work in this direction is not restricted to robotics and engineering science but has wider applications including sports science in the area of force and motion analysis and in the field of mathematical science with a new algorithm for solving homogeneous equations. A number of EPSRC projects were successfully completed and two books on geometrical foundation and screw algebra of mechanisms and robotics were published.
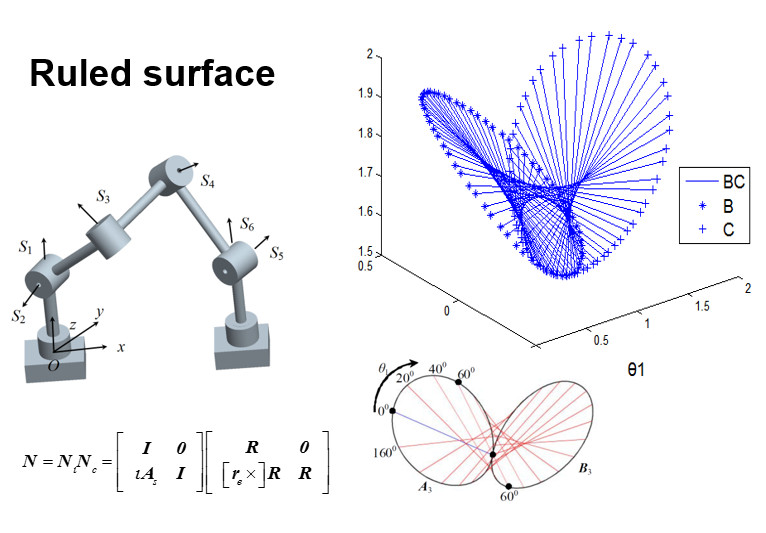
A Representation of A Classical Mechanism
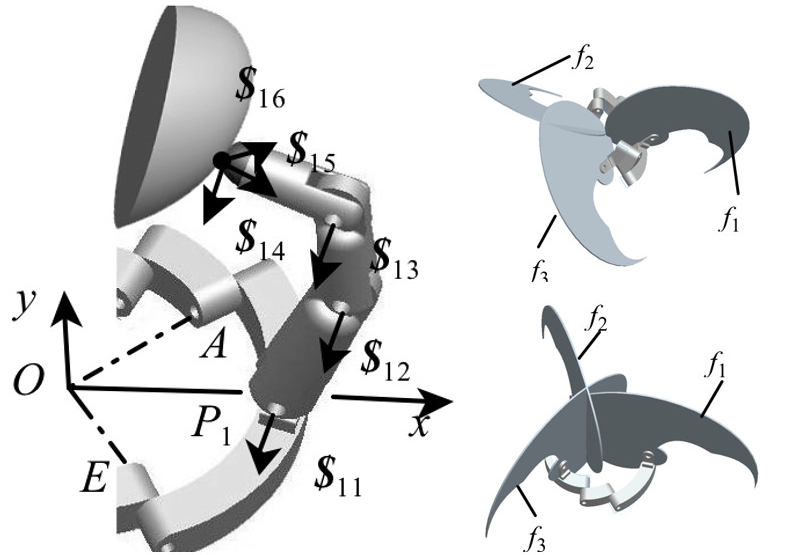
Screw Theory-based Robotic Hand Analysis
Reconfigurable/Metamorphic Mechanisms and Robots
In 1998, the Metamorphic Mechanisms were coined and the paper on the investigation of this novel type of mechanisms that can change the topology and mobility was awarded the “Best Paper” by ASME mechanisms and robotics committee to become one of the only four papers awarded the “best paper” in the 1990s. This initiates a class of mechanisms with reconfigurability. The work on this kind of mechanism was initiated from scratch in the context of metamorphosis while investigating origami-folding in perfumery packaging in 1996. The continuous development in advancing the fundamental theoretical concepts in this research area had significant impact on design and development of mechanisms and robots. As such, the First, Second and Third International Conference on Reconfigurable Mechanisms and Robotics (ReMAR) was held in London in 2009, Tianjin in 2012and Beijing in 2015.
The development of metamorphic mechanisms resulted in a cutting-edge invention patented as ‘Metamorphic Robotic Hands’. The novel robotic hand has a unique changeable palm and generates more hand poses than other comparable hands. This attracted a great interest from industry and has been extensively developed for dexterous manipulation of articulated object and for mobile manipulators interacting with humans, resulting in a number of European Commission Seventh Framework projects on motion synthesis, dextrous manipulation, and human-robot interaction.
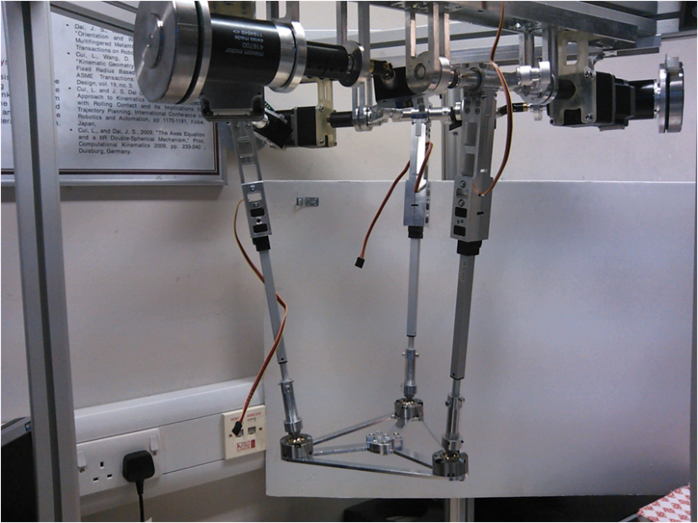
Parallel Robot with variable-Axis Joint(vA joint)

Parallel Manipulator with reconfigurable Joints
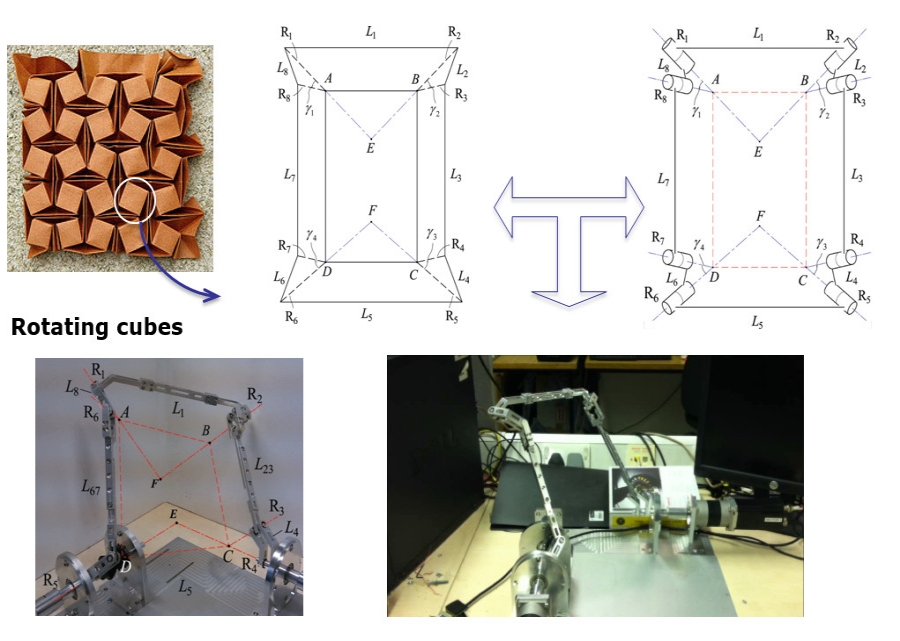
Origami-inspired Mechanisms and Robots
Geometry of origami and kirigami presents a new way for mechanism innovation and engineering design. This cross-disciplinary way of associating artistic origami to engineering kinematic structures was coined as ‘artmimetics’ as a philosophy that converts artistic origami to engineering products. With this philosophical thought, the equivalent-mechanism approach was proposed in 1998 to map an origami fold into a kinematic structure by taking creases as kinematic pairs and panels as links.
In contrast to a conventional mechanism, a mechanism created by this approach as an origami-inspired mechanism has distinct foldability and versatility, initiating a step-change in the development of reconfigurable mechanisms and robots. Following this, various new mechanisms and robots were created. On the other hand, the equivalent-mechanism approach creates a way of analyzing origami folds by initiating a variety of mathematical tools including graph theory for the topological representation, screw theory for the motion representation and Lie groups for the trajectory investigation. This use of mathematical tools to the study of origami folds results in creativity in mechanism development and conversely contributes to investigation of the fascinating artistic artefacts with full of mathematical intrigue.
Origami to Robot Mechanisms then to Origami Robots
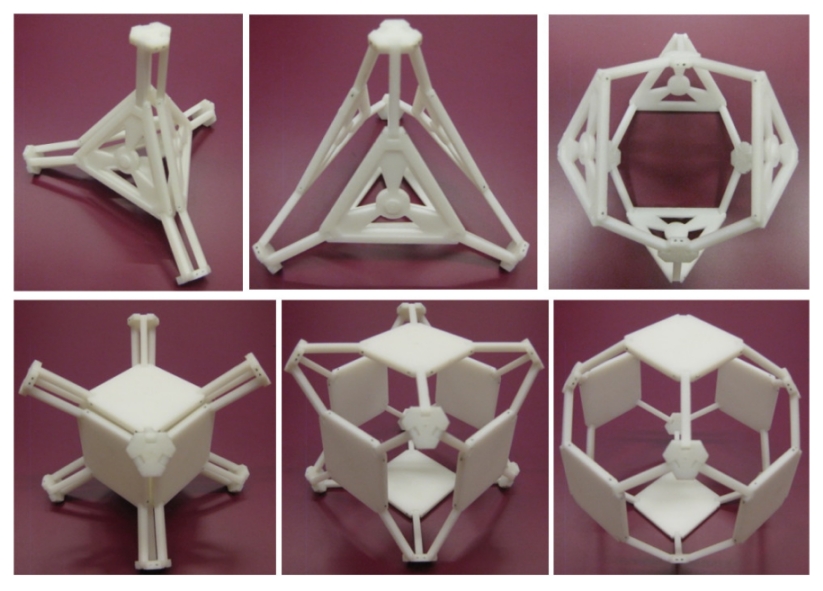
Arts to Deployable Mechanisms
Medical Devices, New Mechanisms and Applications
1) Metamorphic multifingered hands
In contrast to a conventional mechanism, a mechanism created by this approach as an origami-inspired mechanism has distinct foldability and versatility, initiating a step-change in the development of reconfigurable mechanisms and robots. Following this, various new mechanisms and robots were created. On the other hand, the equivalent-mechanism approach creates a way of analyzing origami folds by initiating a variety of mathematical tools including graph theory for the topological representation, screw theory for the motion representation and Lie groups for the trajectory investigation. This use of mathematical tools to the study of origami folds results in creativity in mechanism development and conversely contributes to investigation of the fascinating artistic artefacts with full of mathematical intrigue.
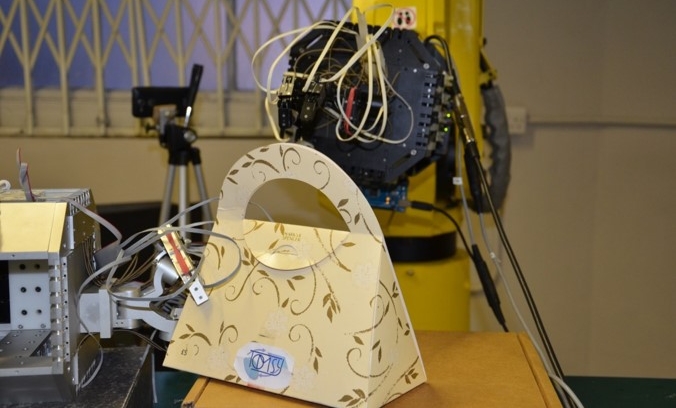
Metamorphic Hand for Origami Folding(TOMSY Project)
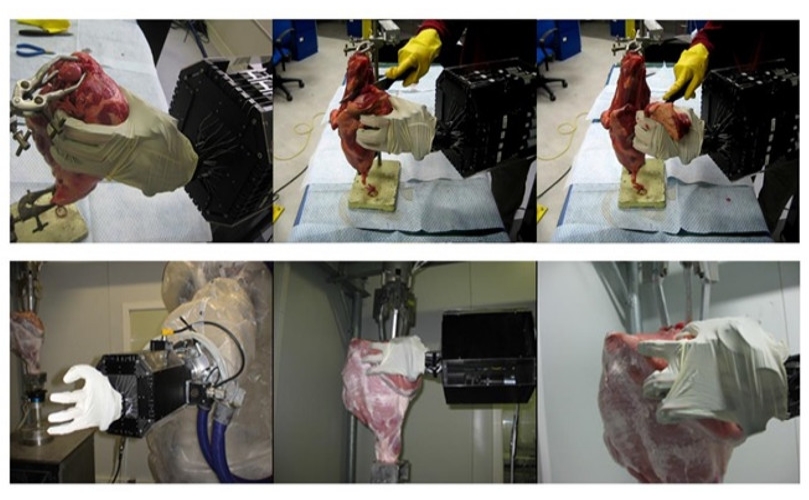
Beef deboning with Hand-Arm System
2) rT joint and vA joint
Novel reconfigurable joints were developed and patented for generating a joint with variable mobility following the principle of metamorphosis by integrating a concept of biology into a mechatronic device. The new joints aroused international interest, by integrating the new joints in the traditional mechanisms and robots, novel reconfigurable mechanisms and robots of multi-functions are emerged.
3) Metamorphic parallel manipulators
The second generation of novel metamorphic parallel manipulators were designed and developed.
4) Rehabilitation device
Started in 1998, new mechanisms and robots were designed and developed for ankle rehabilitation, resulting in the first set of designs in 1999 and study of ankle motion and ankle joint. A first ankle rehabilitation robot with lower-mobility was designed and built in 2005. This led to a second generation was built in collaboration with Italian Institute of Technology. The invited paper published in the special issue on parallel manipulators in Journal of Systems and Control Engineering was awarded the ‘2009 PE Publishing Best Paper’. The research further resulted in collaboration with the Centre for Rehabilitation and Human Performance Research at the University of Salford. The ankle rehabilitation robot is currently to be shipped to Montanery Clinic for medical trial.
Ankle Rehabilitation Robots
5) Surgical devices
In collaboration with Prof Prokar Dasgupta of Guy’s Hospital, novel and miniaturized parallel mechanisms were under development for surgical assistant devices based on metamorphosis.